
本研究論文已發表於 Nature Communications,成功實現了賽博昆蟲群(cyborg insect swarm)之編隊行為控制。
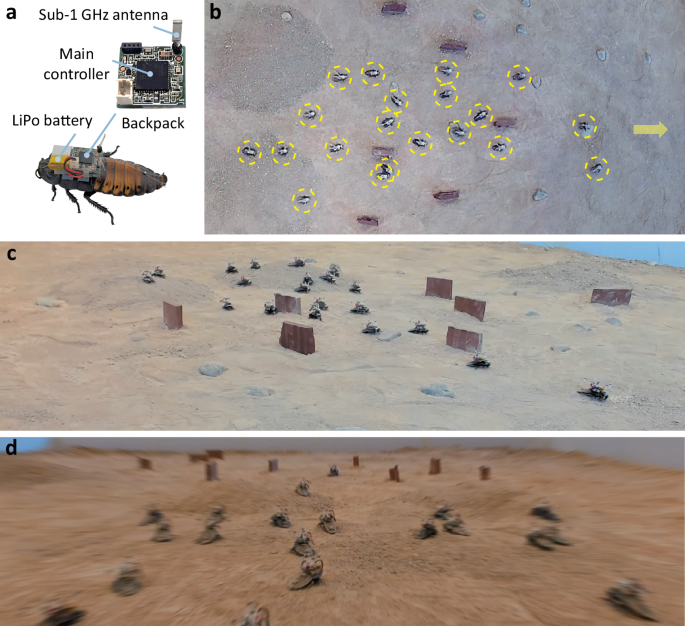
研究展示了透過微型電子裝置與控制演算法的結合,使多隻賽博昆蟲能在開放環境中進行協同運動與隊形保持,為生物混合群體控制(bio-hybrid swarm control)開啟了新的研究方向。
以下為控制實驗的部分畫面:
此外,本研究成果亦登上了廣島大學首頁:

本研究論文已發表於 Nature Communications,成功實現了賽博昆蟲群(cyborg insect swarm)之編隊行為控制。
研究展示了透過微型電子裝置與控制演算法的結合,使多隻賽博昆蟲能在開放環境中進行協同運動與隊形保持,為生物混合群體控制(bio-hybrid swarm control)開啟了新的研究方向。
以下為控制實驗的部分畫面:
此外,本研究成果亦登上了廣島大學首頁:
Copyright© 複雑システム科学研究室 , 2026 All Rights Reserved Powered by STINGER.