
How far can a swarm be controlled from the outside?
When a large number of individuals move collectively, how is the overall behavior determined? And is it possible to guide such a swarm toward an intended direction using only small external interventions?

Shepherding research starts from this question. In this research, we study the problem of guiding a swarm consisting of many agents by a small number of control agents placed outside the swarm. A key point here is that the internal agents of the swarm are not directly controlled. Instead, the control agents influence the overall behavior of the swarm indirectly by adjusting their own positions and movements.
At first glance, this setting may appear intuitive and simple. In reality, however, the motion of individual agents is nonlinear and the available information is limited, making the collective behavior of the swarm difficult to predict. This gap between “simple individuals” and a “complex collective” lies at the core of our research interest.
Shepherding is positioned as a model problem for analyzing this gap. Even as the number of agents in the swarm increases, the number of control agents remains very small. Within this framework, our goal is to clarify what kinds of control strategies are effective and what information is fundamentally necessary.
This problem setting is closely related to distributed algorithms, multi-agent control, and nonlinear system analysis in information science. Through shepherding research, we aim to reveal design principles for swarm control algorithms that remain effective under information constraints.
Mathematical modeling of the shepherding problem
In the shepherding problem, we explicitly distinguish between a large number of agents forming the swarm and a small number of control agents that guide the swarm from the outside. The swarm agents move based on interactions with neighboring agents and do not have direct knowledge of the target position.
In contrast, the control agents (shepherds) know the target position and exert repulsive influences on the swarm through their movement. The shepherds cannot control individual swarm agents directly and are constrained to act on the swarm only indirectly through their own position and motion.
The motion of each swarm agent is commonly described using so-called Boid models. That is, attraction, repulsion, and alignment terms are combined according to distances and relative positions to neighboring agents, determining the direction of motion. Through the accumulation of such local interactions, collective behaviors such as cohesion and fragmentation emerge at the swarm level.
The difficulty of the shepherding problem lies in superimposing external intervention on this structure of local interactions. Although the shepherd’s motion directly affects only a subset of agents, its influence propagates through internal interactions and eventually alters the behavior of the entire swarm.
In this research, we mathematically investigate which state variables should be observed and how control inputs should be designed in order to guide the entire swarm toward a target region. The shepherding problem is thus regarded as a control algorithm design problem for multi-agent systems that involve both information constraints and nonlinearity.
Shepherding research in our laboratory
In our laboratory, we use the shepherding problem as a testbed for designing and analyzing swarm control algorithms under information constraints. In particular, we focus on clarifying which control strategies remain viable as idealized assumptions are gradually removed.
Shepherding of heterogeneous swarms
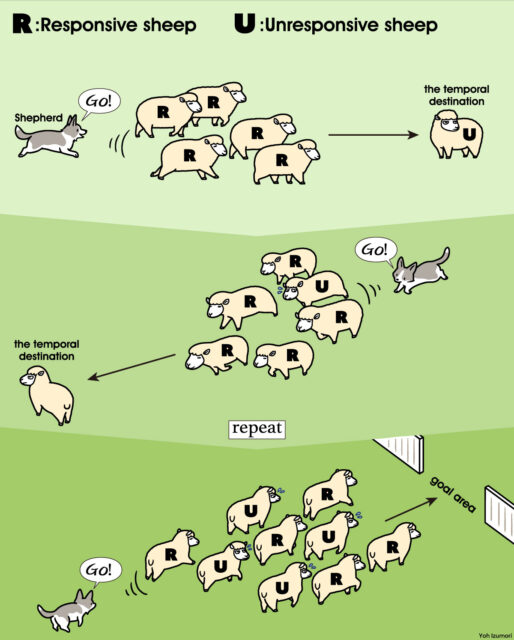
Many existing studies assume that all individuals in the swarm respond in the same way. In reality, however, it is common for some individuals to be unresponsive to control inputs or to exhibit different behaviors.
Our laboratory studies shepherding algorithms that can guide the entire swarm even when responsive and non-responsive agents coexist. By exploiting the interaction structure among agents, we demonstrate that it is possible to guide the swarm as a whole, including individuals that cannot be directly controlled.
Cooperative control of multiple shepherds without communication
When multiple shepherds are used, many methods assume communication among the shepherds. However, communication is not always available due to cost or reliability constraints.
In our laboratory, we propose methods that achieve cooperative shepherding even without communication among shepherds, relying only on local observation information. This is an important problem from the perspective of distributed algorithm design and control under information constraints.
Swarm control with restricted sensing information
Many shepherding algorithms assume that shepherds can accurately measure distances and positions relative to the swarm. In practical sensing environments, however, distance information may be unavailable, and only directional (bearing) information can be used.
We study shepherding methods that guide swarms using only bearing information, without relying on distance measurements. Our results show that effective swarm control is possible even under such extremely limited information conditions.
Skills developed through shepherding research
Shepherding research is not aimed solely at specific applications. In our laboratory, we emphasize acquiring fundamental concepts and methods in information science through shepherding as a research theme.
Thinking with mathematical models
In shepherding, the behavior of swarms and control agents is represented using mathematical models. The key point is not simply constructing models, but deciding which assumptions to introduce, what to simplify, and what aspects to retain as essential.
Through this process, students develop the ability to organize complex phenomena and translate them into mathematically tractable forms. This ability is fundamental across many areas of information science, including control, optimization, and machine learning.
Designing and validating algorithms
In our shepherding research, control strategies are designed as algorithms and their behavior is examined through simulations.
- What information to use
- What rules to follow
- Under what conditions the method works or fails
These aspects are explored through trial and error. This experience strengthens both algorithm design skills and validation skills.
Reasoning under information constraints
Shepherding research deliberately avoids assuming full access to information. Constraints such as lack of communication, absence of distance measurements, or unresponsive agents are explicitly considered.
Solving problems under such constraints cultivates a mindset that assumes incomplete information, which is essential when dealing with real systems and real-world data.
Connections to a wide range of information science fields
Research based on shepherding naturally connects to multiple fields in information science, including multi-agent systems, distributed algorithms, nonlinear control, and optimization.
As a result, students can broaden their interests toward theory-oriented, algorithm-oriented, or simulation-oriented directions as they progress in their research. This makes shepherding a suitable research theme for students who wish to build a strong foundational skill set in information science.
Development of a game for experiencing shepherding
The control principles and algorithms studied in shepherding research can be difficult to grasp intuitively through equations and simulations alone. To address this, our laboratory has developed a game that allows users to experience shepherding firsthand.

In this game, the player takes the role of a shepherd and attempts to guide the entire swarm to a target region by adjusting position and movement from outside the swarm. Direct manipulation of internal agents is not allowed, reflecting the same constraints as the shepherding problem studied in research.
Through gameplay, players can intuitively understand:
- Where to position themselves to move the swarm effectively
- When to intervene
- Why seemingly reasonable actions may fail
This complements results presented in papers and equations by providing an intuitive perspective.
The game is not independent of the research itself but serves as a platform for implementing and visualizing algorithms and insights obtained through research. By immediately observing how changes in control strategies affect behavior, the game functions as an educational tool that supports iterative algorithm design and validation.
The shepherding game provides an opportunity not only to “understand” research concepts but also to “test and verify” them, offering an experiential way to learn algorithm design and validation in information science.