
群れは,外からどこまで制御できるのか
多数の個体が集まって動くとき,全体の振る舞いはどのように決まるのでしょうか.そして,そのような群れに対して,外部からのわずかな介入だけで,全体を意図した方向へ導くことは可能なのでしょうか.

Shepherding(シェパーディング)研究は,この問いを出発点とします.本研究では,多数のエージェントからなる群れを,群れの外側に配置された少数の制御エージェントによって誘導する問題を扱います.ここで重要なのは,群れの内部を直接制御しないという点です.制御エージェントは,自身の位置や動きを調整することで,間接的に群れ全体の挙動に影響を与えます.
このような設定は,一見すると直感的で単純に見えるかもしれません.しかし実際には,個々のエージェントの運動が非線形であり,情報も限定されているため,群全体の挙動は容易には予測できません.この「単純な個体」と「複雑な集団」のギャップこそが,本研究の中心的な関心です.
Shepherding は,このギャップを解析するための モデル問題として位置づけられます.群れを構成するエージェントの数が増えても,制御エージェントの数はごく少数に保たれます.その中で,どのような制御戦略が有効なのか,どのような情報が本質的に必要なのかを明らかにすることが,本研究の目的です.
この問題設定は,情報科学における分散アルゴリズム,マルチエージェント制御,非線形システム解析と深く関係しています.Shepherding 研究を通じて,情報制約下でも成立する群制御アルゴリズムの設計原理を明らかにすることを目指しています.
Shepherding 問題の数理モデル
Shepherding 問題では,群れを構成する多数のエージェントと,それを外部から誘導する少数の制御エージェントを明確に区別してモデル化します.群れ側のエージェントは,自身の近傍に存在する他のエージェントとの相互作用に基づいて運動し,あらかじめ与えられた目標位置を直接知ることはありません.
一方で,制御エージェント(シェパード)は目標位置を知っており,自身の移動によって群れに斥力的な影響を与えます.このとき,シェパードは群れ内部の個体を個別に制御することはできず,位置や運動の選択を通じて間接的に群全体へ作用するという制約を受けます.
群れの各エージェントの運動は,いわゆる Boid モデルに基づいて記述されることが一般的です.
すなわち,近傍個体との距離や相対位置に応じて,引力・斥力・整列といった要素が組み合わさり,移動方向が決定されます.このような局所相互作用の積み重ねによって,群れ全体としての凝集や分裂といった集団挙動が生じます.
Shepherding 問題の難しさは,この局所的な相互作用構造の上に,外部からの介入を重ね合わせる点にあります.シェパードの動きは群れの一部の個体にしか直接影響しませんが,その影響が群れ内部の相互作用を通じて伝播し,最終的に全体の挙動を変化させます.
本研究では,このような構造を持つ系に対して,どの状態量を観測し,どのような制御入力を設計すれば,群れ全体を目標領域へ誘導できるのかを数理的に検討します.Shepherding 問題は,情報制約と非線形性を併せ持つマルチエージェント系における制御アルゴリズム設計問題として捉えられます.
本研究室で取り組んでいる Shepherding 研究
本研究室では,Shepherding 問題を題材として,情報制約下における群制御アルゴリズムの設計と解析に取り組んでいます.特に,理想的な仮定を徐々に取り除いたときに,どのような制御戦略が成立するのかを明らかにすることを重視しています.
異質性を含む群れの Shepherding
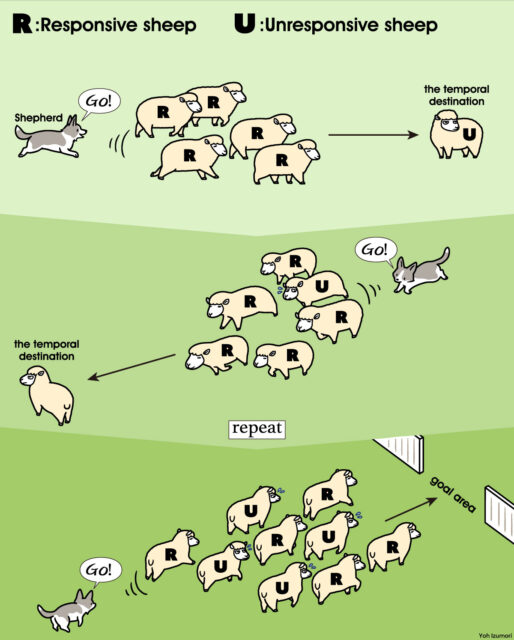
多くの既存研究では,群れを構成するすべての個体が同じように反応すると仮定されています.しかし現実には,一部の個体が制御入力に反応しない,あるいは異なる挙動を示すことは珍しくありません.
本研究室では,反応する個体と反応しない個体が混在する 異質な群れに対しても,全体を誘導可能とする Shepherding アルゴリズムを研究しています.個体間の相互作用構造を利用することで,直接制御できない個体を含めた群全体の誘導が可能となることを示しています.
通信を用いない複数シェパードの協調制御
複数のシェパードを用いる場合,多くの手法ではシェパード間の通信が前提とされます.しかし,通信はコストや信頼性の観点から常に利用できるとは限りません.
本研究室では,シェパード間に通信を仮定しない状況でも,局所的な観測情報のみに基づいて協調的な Shepherding を実現する手法を提案しています.これは,分散アルゴリズム設計や情報制約付き制御という観点から,情報科学的に重要な課題です.
制限されたセンシング情報による群制御
多くの Shepherding アルゴリズムでは,シェパードが群れとの距離や位置を正確に測定できることが仮定されています.しかし実際のセンサ環境では,距離情報が得られず,方向情報のみが利用可能な場合も多く存在します.
本研究室では,距離を用いず,方向(bearing)情報のみに基づいて群れを誘導する Shepherding 手法について研究しています.このような極めて限定的な情報環境下でも,適切な制御戦略によって群制御が可能であることを示しています.
Shepherding 研究を通じて身につく力
Shepherding 研究は,特定の応用だけを目的としたものではありません.本研究室では,Shepherding を題材として,情報科学における基礎的な考え方や手法を身につけることを重視しています.
数理モデルを「使って考える力」
Shepherding では,群れや制御エージェントの振る舞いを数理モデルとして表現します.
重要なのは,モデルを立てること自体ではなく,どの仮定を置き,どこを単純化し,何を本質として残すかを考える点です.
この過程を通じて,複雑な現象を整理し,数理的に扱える形に落とし込む力を養います.これは,制御,最適化,機械学習など,情報科学の多くの分野に共通する基礎能力です.
アルゴリズムを設計し,検証する力
本研究室の Shepherding 研究では,制御戦略をアルゴリズムとして設計し,シミュレーションを通じてその挙動を検証します.
- どの情報を使うか
- どのようなルールで動かすか
- どの条件でうまくいき,どこで破綻するか
といった点を,自分で試行錯誤しながら明らかにしていきます.この経験は,アルゴリズム設計力と検証力を同時に鍛えるものです.
情報制約を前提に考える姿勢
Shepherding 研究では,「すべての情報が使える」という前提をあえて置きません.
通信ができない,距離が測れない,一部の個体が反応しないといった制約を明示的に扱います.
このような制約下で問題を解く経験は,実システムや現実データを扱う際に不可欠な,情報の不完全さを前提とした思考を身につけることにつながります.
情報科学の幅広い分野への接続
Shepherding を題材とした研究は,マルチエージェントシステム,分散アルゴリズム,非線形制御,最適化など,情報科学の複数分野と自然につながっています.
そのため,研究を進めながら,自分の興味に応じて理論寄り,アルゴリズム寄り,シミュレーション寄りへと関心を広げることが可能です.特定の分野に閉じずに,情報科学の基礎体力を身につけたい学生にとって,適した研究テーマです.
Shepherding を体験できるゲームの開発
Shepherding 研究で扱っている制御原理やアルゴリズムは,数式やシミュレーションだけでは直感的に分かりにくい側面があります.そこで本研究室では,Shepherding の考え方を実際に体験できるゲームを開発しています.

このゲームでは,プレイヤーがシェパード役となり,群れの外側から位置や動きを調整することで,群全体を目標領域へ誘導することを試みます.
群れの内部を直接操作することはできず,研究で扱っている Shepherding 問題と同じ制約が課されています.
ゲームを通じて,
- どの位置に立つと群れが動きやすいか
- どのタイミングで介入すべきか
- 一見うまくいきそうな操作がなぜ失敗するのか
といった点を,直感的に理解することができます.これは,論文や数式で示される結果を,感覚的に補完する役割を果たします.
また,このゲームは研究と独立したものではなく,研究で得られたアルゴリズムや知見を実装・可視化する場として位置づけられています.制御戦略を変更すると挙動がどう変わるかを即座に確認できるため,アルゴリズム設計と検証を往復するための教育的ツールとしても活用しています.
Shepherding ゲームは,研究内容を「理解する」だけでなく,「試して確かめる」ための取り組みであり,情報科学におけるアルゴリズム設計と検証の考え方を体験的に学ぶ機会を提供します.